import time
from dataclasses import dataclass
import jax
import jax.numpy as jnp
import matplotlib.pyplot as plt
import numpy as np
from matplotlib.patches import CircleC/GMRESのJAX実装
おことわり
この記事は村山裕和氏による記事: https://zenn.dev/takuya_fukatsu/articles/0b9c8df4a51042 を学習するためのメモです
# 連続状態方程式
@jax.jit
def model_func(x, u):
Bk = jnp.array([[jnp.cos(x[2]), 0], [jnp.sin(x[2]), 0], [0, 1]], dtype=jnp.float32)
x_dot = Bk @ u
return x_dot# コントローラーに関するパラメーター
@dataclass
class Cont_Args:
# コントローラーのパラメータ
Ts = 0.02 # 制御周期
tf = 1.0 # 予測ホライズンの最終長さ
N = 50 # 予測ホライズンの分割数
# dt = Ts # 今回は意味の無いパラメータなので無視してください
alpha = 0.5 # 予測ホライズンを変化させる計算のパラメータ
zeta = 1 # U_dotを計算する時の係数パラメータ(zetaと書いてますがツェータです)
# 評価関数中の重み
# 状態変数の項
Q = jnp.array([[1, 0, 0], [0, 1, 0], [0, 0, 0]], dtype=jnp.float32) * 0
# 制御入力の項
R = jnp.array([[100, 0], [0, 10]], dtype=jnp.float32)
# 最終地点の項
S = jnp.array([[1, 0, 0], [0, 1, 0], [0, 0, 0]], dtype=jnp.float32) * 100
# 目標地点
x_ob = jnp.array([5, 0, 0], dtype=jnp.float32)
# 目標入力
u_ob = jnp.array([0, 0], dtype=jnp.float32)
# 次元データ
obss_dim = 3 # 状態変数の次元
action_dim = 2 # 入力変数の次元
# 状態と入力
x = None
u = None
us = None
# 障害物の場所(中心)
ev_pos = jnp.array([[2.5, 0.15, 0]], dtype=jnp.float32)
# 障害物の半径
d_ = 0.3
# ロボットの半径
r_ = 0.1
# 障害物の中心から取るべき距離
d = d_ + r_
# 緩和対数バリア関数の緩和値
del_bar = 0.05
# 回避バリア関数の重み
r = 50
# 入力制限
umax = jnp.array([1.0, 1.0], dtype=jnp.float32)
umin = jnp.array([-1.0, -1.0], dtype=jnp.float32)
# 計算用行列
bar_C = jnp.concatenate([jnp.eye(action_dim, dtype=jnp.float32), -jnp.eye(action_dim, dtype=jnp.float32)], 0)
bar_d = jnp.concatenate([umax, -umin], 0)
# 速度制限のバリア関数の重み
b = 10
args = Cont_Args()# バリア関数(-logか二次関数かを勝手に切り替える)
@jax.jit
def barrier_z(z):
pred = z > args.del_bar
def true_fun(z):
return -jnp.log(z)
def false_fun(z):
return 0.5 * (((z - 2 * args.del_bar) / args.del_bar) ** 2 - 1) - jnp.log(args.del_bar)
return jax.lax.cond(pred, true_fun, false_fun, z)# バリア関数(全体)
@jax.jit
def barrier(u):
zs = args.bar_d - args.bar_C @ u
def vmap_fun(b, z, margin=0.5):
return b * jnp.where(z >= margin, barrier_z(margin), barrier_z(z))
Bars = jax.vmap(vmap_fun, (None, 0))(args.b, zs)
Bar = jnp.sum(Bars)
return Bar# 対数バリア関数型回避関数
@jax.jit
def evasion(x):
def vmap_fun(x, xe, r, d, margin=0.5):
distance = jnp.linalg.norm(x - xe, ord=2)
z = distance**2 - d**2
ref = d + margin
return r * jnp.where(distance >= ref, barrier_z(ref**2 - d**2), barrier_z(z))
evas = jax.vmap(vmap_fun, (None, 0, None, None))(x, args.ev_pos, args.r, args.d)
eva = jnp.sum(evas)
return eva# ステージコスト
@jax.jit
def stage_cost(x, u):
cost = (
0.5 * ((x - args.x_ob) @ args.Q @ (x - args.x_ob) + (u - args.u_ob) @ args.R @ (u - args.u_ob))
+ evasion(x)
+ barrier(u)
)
return cost
# 終端コスト
@jax.jit
def term_cost(x):
cost = 0.5 * (x - args.x_ob) @ args.S @ (x - args.x_ob)
return cost# 終端コストの微分
grad_x_term = jax.jit(jax.grad(term_cost, 0))# コントローラー関数
@jax.jit
def CGMRES_control(x, us, t):
def rollout(x_init, us, dt):
def rollout_body(carry, u):
x = carry
x = x + model_func(x, u) * dt
return x, x
_, xs = jax.lax.scan(rollout_body, x_init, us)
xs = jnp.vstack([x_init[None], xs])
return xs
def Hamilton(x, u, lambda_):
H = stage_cost(x, u) + lambda_ @ model_func(x, u)
return H
dHdx = jax.grad(Hamilton, 0)
dHdu = jax.grad(Hamilton, 1)
def Backward(xs, us, dt):
def Backward_body(carry, val):
lambda_ = carry
x, u = val
lambda_ = lambda_ + dHdx(x, u, lambda_) * dt
return lambda_, lambda_
lambda_ = grad_x_term(xs[-1])
_, out_lambdas = jax.lax.scan(Backward_body, lambda_, (jnp.flip(xs[1:-1], 0), jnp.flip(us[1:], 0)))
lambdas = jnp.flip(jnp.vstack([lambda_, out_lambdas]), axis=0)
return lambdas
def F_(x, us, t):
us = jnp.reshape(
us, (-1, args.action_dim)
) # 計算の都合上、入力の時にusを横一列に並べ直しているので、ここで直す
dt = (1 - jnp.exp(-args.alpha * t)) * args.tf / args.N # 予測ホライズンの分割幅を計算
xs = rollout(x, us, dt)
lambdas = Backward(xs, us, dt)
F = jax.vmap(dHdu, (0, 0, 0))(xs[:-1], us, lambdas)
F = jnp.reshape(F, (-1,))
return F
dFdU_ = jax.jacrev(F_, 1)
dFdx_ = jax.jacrev(F_, 0)
dFdt_ = jax.jacrev(F_, 2)
# GMRES法関数(Ax=bの初期残差をrとする)
def GMRES(A, r, max_iter=5):
def arnoldi(A, v1, m):
n = v1.shape[0]
Vm_1 = jnp.zeros((n, m + 1))
H = jnp.zeros((m + 1, m))
Vm_1 = Vm_1.at[:, 0].set(v1)
def body_fun(j, val):
Vm_1, H = val
v = A @ Vm_1[:, j]
def body_in(i, val):
Vm_1, H, v = val
H = H.at[i, j].set(jnp.dot(Vm_1[:, i], v))
v = v - H[i, j] * Vm_1[:, i]
return Vm_1, H, v
Vm_1, H, v = jax.lax.fori_loop(0, j + 1, body_in, (Vm_1, H, v))
H = H.at[j + 1, j].set(jnp.linalg.norm(v))
Vm_1 = Vm_1.at[:, j + 1].set(v / H[j + 1, j])
return Vm_1, H
Vm_1, H = jax.lax.fori_loop(0, m, body_fun, (Vm_1, H))
return Vm_1, H
def givens_rotation(v1, v2):
t = jnp.sqrt(v1**2 + v2**2)
c = v1 / t
s = -v2 / t
return c, s
Vm_1, H = arnoldi(A, r / jnp.linalg.norm(r), max_iter)
beta = jnp.linalg.norm(r)
e1 = jnp.zeros(max_iter + 1)
e1 = e1.at[0].set(beta)
def body_fun(i, val):
H, e1 = val
c, s = givens_rotation(H[i, i], H[i + 1, i])
Givens = jnp.array([[c, s], [-s, c]])
H_col = jax.lax.dynamic_slice(H, (i, 0), (2, max_iter))
H = jax.lax.dynamic_update_slice(H, Givens @ H_col, (i, 0))
e1_slice = jax.lax.dynamic_slice(e1, (i,), (2,))
e1 = jax.lax.dynamic_update_slice(e1, Givens @ e1_slice, (i,))
return H, e1
H, e1 = jax.lax.fori_loop(0, max_iter, body_fun, (H, e1))
y = jnp.linalg.solve(H[:max_iter, :max_iter], e1[:max_iter])
x = Vm_1[:, :max_iter] @ y
return x
# ここから本計算
us_ = jnp.reshape(us, (-1,)) # Fの計算の都合上、横一列に並べ直す
W = 0.1 * jnp.ones((args.action_dim * args.N), dtype=jnp.float32) # GMRES法における初期解
x_dot = model_func(x, us[0])
dFdU = dFdU_(x, us_, t) # 自動微分が使えるので、差分近似を使わずに計算できる
dFdx = dFdx_(x, us_, t)
dFdt = dFdt_(x, us_, t)
r = -args.zeta * F_(x, us_, t) - dFdx @ x_dot - dFdt - dFdU @ W
kai = GMRES(dFdU, r)
U_dot = W + kai
U_dot = jnp.reshape(U_dot, (-1, args.action_dim))
U = us + U_dot * args.Ts
return U# 初期条件
args.u = jnp.zeros((args.action_dim), dtype=jnp.float32)
args.us = jnp.zeros((args.N, args.action_dim), dtype=jnp.float32)
args.x = jnp.zeros((args.obss_dim), dtype=jnp.float32)
Time = 0.0
time_stamp = []
x_log = []
u_log = []start = time.time()
while Time <= 20:
time_stamp.append(Time)
x_log.append(args.x)
u_log.append(args.u)
us = CGMRES_control(args.x, args.us, Time)
x_dot = model_func(args.x, args.u)
x = args.x + x_dot * args.Ts
Time += args.Ts
args.x = x
args.u = us[0]
args.us = us
end = time.time()
loop_time = end - start
print("計算時間:{}[s]".format(loop_time))計算時間:4.995308876037598[s]time_log = np.array(time_stamp)
x_log = np.array(x_log)
u_log = np.array(u_log)
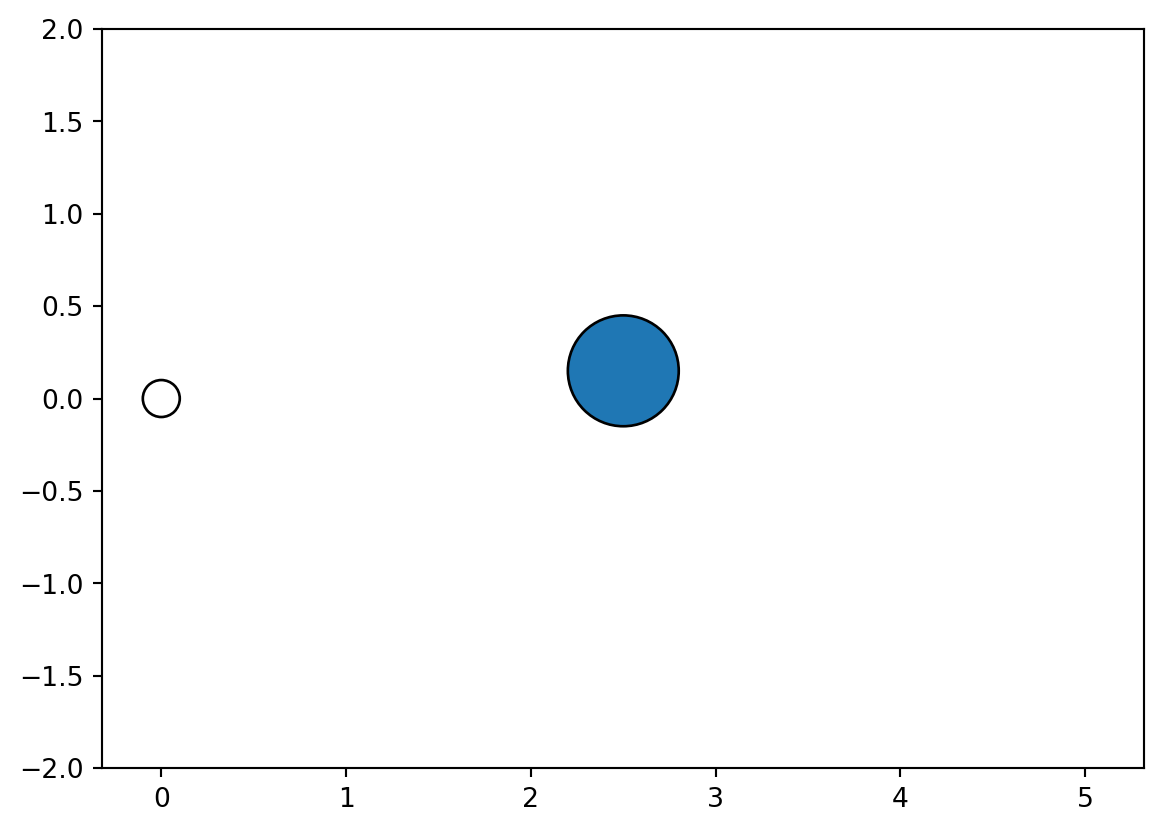
fig = plt.figure()
ax = plt.axes()
ax.set_xlim(-1, 6)
ax.set_ylim(-2, 2)
plt.axis("equal")
robot = Circle(xy=x_log[0][:2], radius=args.r_, fill=False)
ax.add_artist(robot)
(line,) = ax.plot([], [], "r-", lw=2)
def update(frame):
x, y, theta = x_log[frame]
robot.center = (x, y)
line_x = [x, x + args.r_ * np.cos(theta)]
line_y = [y, y + args.r_ * np.sin(theta)]
line.set_data(line_x, line_y)
return robot, line
obstacle = Circle(xy=args.ev_pos[0], radius=args.d_, ec="k")
ax.add_artist(obstacle)
# anim = FuncAnimation(fig, update, frames=501, interval=20, blit=True)
#
# writer = PillowWriter(fps=50) # fpsはフレームレートを指定
# anim.save("CGMRES.gif", writer=writer)
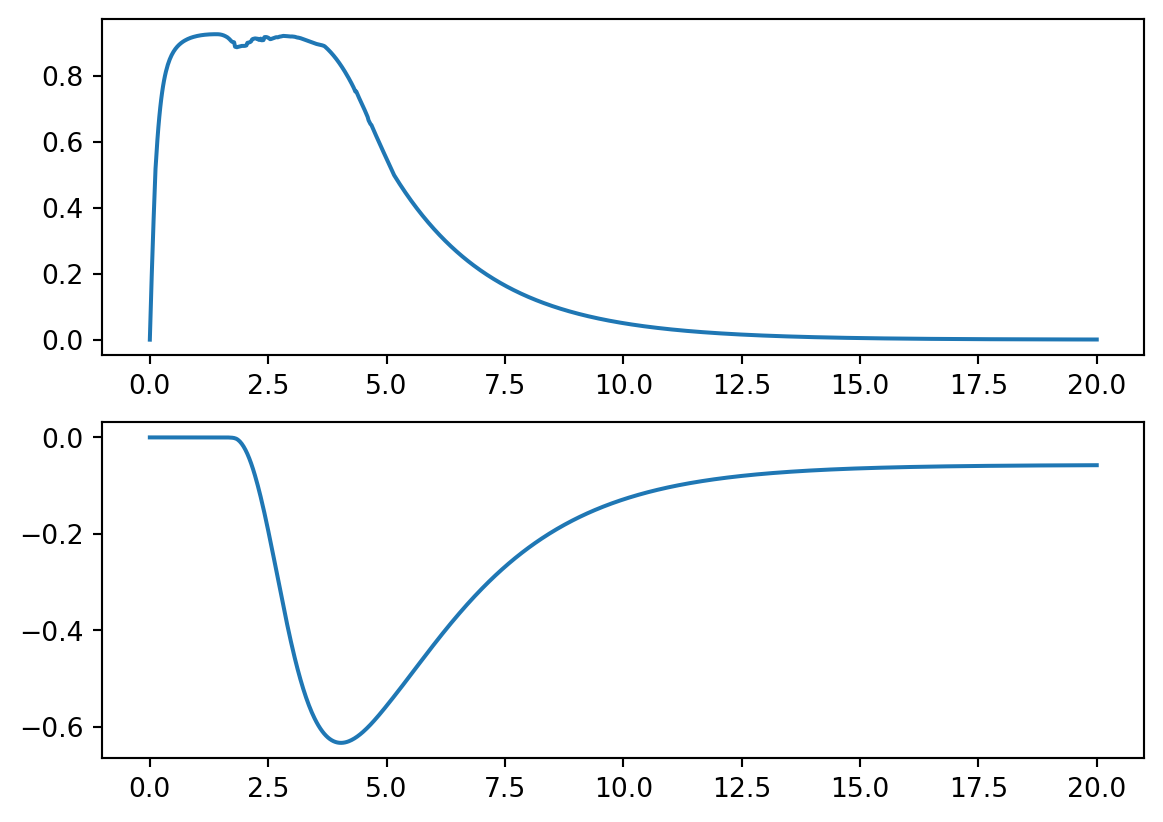
fig2 = plt.figure()
ax1 = fig2.add_subplot(211)
ax2 = fig2.add_subplot(212)
ax1.plot(time_log, u_log[:, 0])
ax2.plot(time_log, x_log[:, 1])
plt.show()