import numpy as np
# 問題設定
A = np.array([[0, 1], [-6, -5]], dtype=float)
B = np.array([[0], [1]], dtype=float)
S_f = np.array([[13, 0], [0, 1]], dtype=float)
Q = np.array([[13, 0], [0, 1]], dtype=float)
R = np.array([[1]], dtype=float)
x_0 = np.array([[-1], [0]], dtype=float)
# 解く区間
N = 10離散LQ制御の例(初期条件のみの場合)
問題設定
状態ベクトルの次元n=2, 入力制御ベクトルの次元m=1とし, 線形システム
x(k+1) = Ax(k) + B u(k)
を考える. ここで A=\begin{bmatrix} 0 & 1\\ -6&-5\end{bmatrix},\quad B=\begin{bmatrix} 0\\1 \end{bmatrix} とし, 初期値は x(0)=\begin{bmatrix} -1\\ 0\end{bmatrix}
とする. 評価関数は
J=\dfrac12 x^T(N) S_fx(N) + \sum_{k=1}^{N-1}\dfrac12\left(x^T(k)Qx(k) + u^T(k)Ru(k)\right).
において S_f=Q=\begin{bmatrix} 13& 0\\ 0&1\end{bmatrix},\quad R=\begin{bmatrix} 1 \end{bmatrix} とする. すなわち
J=\dfrac12\sum_{k=1}^{N}\left(13x_1(k)^2 + x_2(k)^2 +u(k)^2\right)
を最小化する最適制御を考える. このときリッカチ方程式は
\left\{\begin{split} S(k) &=Q+A^TS(k+1)A\\ &\quad - A^TS(k+1)B(R+B^TS(k+1)B)^{-1}B^TS(k+1)A,\quad k=1,\cdots, N-1,\\ S(N)&=S_f \end{split}\right.
である. 以下のステップで最適制御を求める
- S(N), S(N-1), \cdots, S(1)をリッカチ方程式を解いて求める
- k=0,\cdots N-1 について,
- u(k) = -(R+B^TS(k+1)B)^{-1}B^TS(k+1)Ax(k) から, x(k), S(k+1)を用いてu(k)を定める
- 状態方程式x(k+1)=Ax(k)+Bu(k) から x(k), u(k)を用いてx(k+1)を求める
- 可視化
1. S(N), S(N-1), \cdots, S(1)をリッカチ方程式を解いて求める
# リッカチ方程式は時間逆向きに解いてリストに加え, 最後に逆順に並べる
riccati_sols = [S_f.copy()]
for _ in range(N - 1):
S_next = riccati_sols[-1]
S = Q.copy()
S += A.T @ S_next @ A
S -= A.T @ S_next @ B @ np.linalg.inv(R + B.T @ S_next @ B) @ B.T @ S_next @ A
riccati_sols.append(S)
riccati_sols.reverse()2. k=0,\cdots N-1についてu(k), x(k+1)を求める
リッカチ方程式の解とオイラー・ラグランジュ方程式を用いて最適制御と状態ベクトルを逐次的に求めていく
X = [x_0]
U = []
for k in range(N - 1):
x_k = X[-1]
S_k1 = riccati_sols[k]
u_k = -np.linalg.inv(R + B.T @ S_k1 @ B) @ B.T @ S_k1 @ A @ x_k
U.append(u_k)
X.append(A @ x_k + B * u_k)3. 可視化
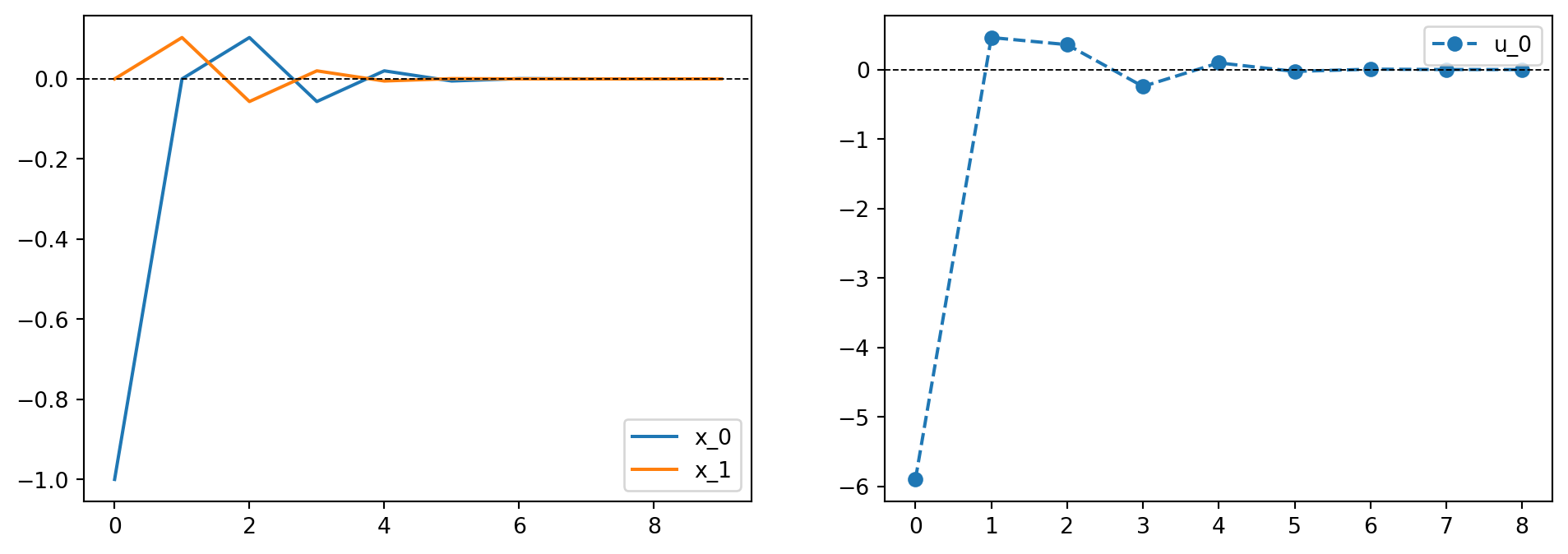
得られた状態ベクトル(左図)と制御入力(右図)をグラフを表示する
- 左図より, オーバーシュートは発生しているが抑えられていることがわかる
- 状態ベクトル, 制御入力ともにk=5あたりで0の十分近くに到達している
import matplotlib.pyplot as plt
X = np.array(X).reshape(N, 2)
U = np.array(U).reshape(N - 1, 1)
plt.figure(figsize=(12, 4))
plt.subplot(1, 2, 1)
for k in range(2):
plt.plot(np.arange(0, N), X[:, k], label=f"x_{k}")
plt.axhline(0, color="black", linestyle="--", linewidth=0.7)
plt.legend()
plt.subplot(1, 2, 2)
for k in range(1):
plt.plot(np.arange(0, N - 1), U[:, k], marker="o", linestyle="--", label=f"u_{k}")
plt.axhline(0, color="black", linestyle="--", linewidth=0.7)
plt.legend()
plt.show()