x_f, y_f = 4, 1最速降下線問題
最速降下線問題
問題設定
水平方向をx軸, 鉛直下方をy軸とする直交座標系を考える.
原点から自由落下して(x_f,y_f)に, y=y(x)という道上を重力のみを受けて通れるようにした場合に, 最速で到達するようにしたい.
問題の定式化
重力加速度g>0, 質点の質量をm>0とすると, 速度vはエネルギー保存則より \dfrac{1}{2}mv^2 -mgy=0 から質点の高さyに依存し, v(y)=\sqrt{2gy}と表せる.
したがって, 質点が(x,y(x))にあるとき, 質点のx方向の速度は
\dfrac{v(g(y))}{\sqrt{1+y'(x)^2}} = \sqrt{\dfrac{2gy}{1+y'(x)^2}}.
したがって, 評価関数
J(y) = \int_0^{x_f} \sqrt{\dfrac{1+y'(x)^2}{2gy}}\,dx
がx=x_fに到達するまでにかかる時間である.
これは変分法の varational_calculus.html#コスト関数が第3変数tについて依存しないとき の場合についての定式化されるため, 以下のオイラーの方程式を解くことで停留条件が求められる.
オイラーの方程式
L(y,q) = \sqrt{\dfrac{1+q^2}{2gy}}
としたときの時間 t に依存しないコスト関数に対するオイラーの方程式は
\dfrac{\partial L }{\partial q}(y(x),y'(x))y'(x) -L(y(x),y'(x))=c_1
がある実数cについて成り立つことである. 整理すると, 実数を取り替えて
y(x)(1+y'(x)^2)=c
がある実数cについて成り立つことと言い換えられる.
ここで, y(\theta)=\dfrac{c}{2}(1-\cos\theta)と置いてみると, \frac{d y}{d\theta}=c\sin{\frac{\theta}{2}}\cos{\frac{\theta}{2}}であり, 微分方程式から
\begin{aligned} \frac{d y}{d x} &= \sqrt{\dfrac{c-y}{y}}\\ &= \sqrt{\dfrac{1+\cos\theta}{1-\cos\theta}}\\ &= \dfrac{1}{\tan{\frac{\theta}{2}}} \end{aligned}
を得る. 媒介変数の微分により
\begin{aligned} \dfrac{dx}{d\theta} &= c \sin^2\frac{\theta}{2}\\ &= \dfrac{c}{2}(1-\cos\theta) \end{aligned}
を得る. 積分して, x(\theta)=\dfrac{c}{2}(\theta-\sin\theta) を得る.
あとはパラメータcを終点を通るように選べばよい
数値解
ある\theta_1\in(\pi, 2\pi)であって(x(\theta_1), y(\theta_1))=(x_f, y_f)を満たすようなc>0を見つければ良い(もしこの範囲で見つからなかったら, \theta_1\in(0, \pi)で改めて探す)
cは区間
\left(\dfrac{x_f}{\pi}, \dfrac{2x_f}{\pi}\right)
にあるので, 二分探索により求めていく
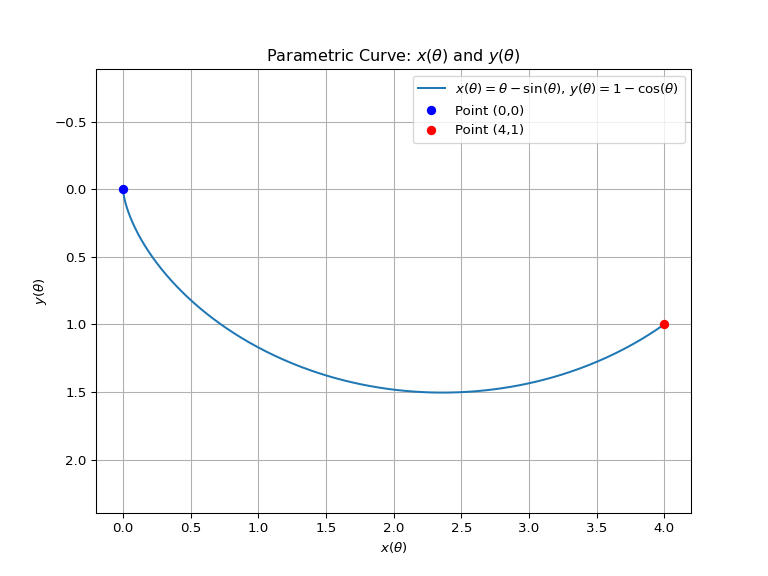
以下の例では(x_f, y_f) = (4,1)として求めていく
import numpy as np
from scipy.optimize import fsolve
def sol_to_xf(param):
return fsolve(lambda x: param / 2 * (x - np.sin(x)) - x_f, 1.0)[0]
def theta_to_y(theta, param):
return param / 2 * (1 - np.cos(theta))
def param_is_too_big(param):
theta = sol_to_xf(param)
y = theta_to_y(theta, param)
return y > y_feps = 1e-10
def initial_interval(x_f):
left = x_f / np.pi
right = 2 * x_f / np.pi
if not param_is_too_big(right):
left = 2 * x_f / np.pi
right = 1e10
return left, right
def binary_search_param(left, right, error):
mid = (left + right) / 2
if right - left < error:
return mid
if param_is_too_big(mid):
return binary_search_param(left, mid, error)
else:
return binary_search_param(mid, right, error)
left, right = initial_interval(x_f)
const = binary_search_param(left, right, eps)import matplotlib.pyplot as plt
theta_1 = sol_to_xf(const)
theta = np.linspace(0, theta_1, 500)
# x(θ) と y(θ) の定義
x = const / 2 * (theta - np.sin(theta))
y = const / 2 * (1 - np.cos(theta))
# プロット
plt.figure(figsize=(8, 6))
plt.plot(x, y, label=r"$x(\theta) = \theta - \sin(\theta)$, $y(\theta) = 1 - \cos(\theta)$")
plt.plot(0, 0, "bo", label="Point (0,0)")
plt.plot(x_f, y_f, "ro", label=f"Point ({x_f},{y_f})")
# 軸ラベル
plt.xlabel(r"$x(\theta)$")
plt.ylabel(r"$y(\theta)$")
# 軸のスケールを同じに設定
plt.axis("equal")
# y軸を逆転
plt.gca().invert_yaxis()
# グリッドを追加
plt.grid(True)
# グラフのタイトルと凡例を設定
plt.title(r"Parametric Curve: $x(\theta)$ and $y(\theta)$")
plt.legend()
plt.savefig("cycloid_curve.png")
# グラフを表示
plt.show()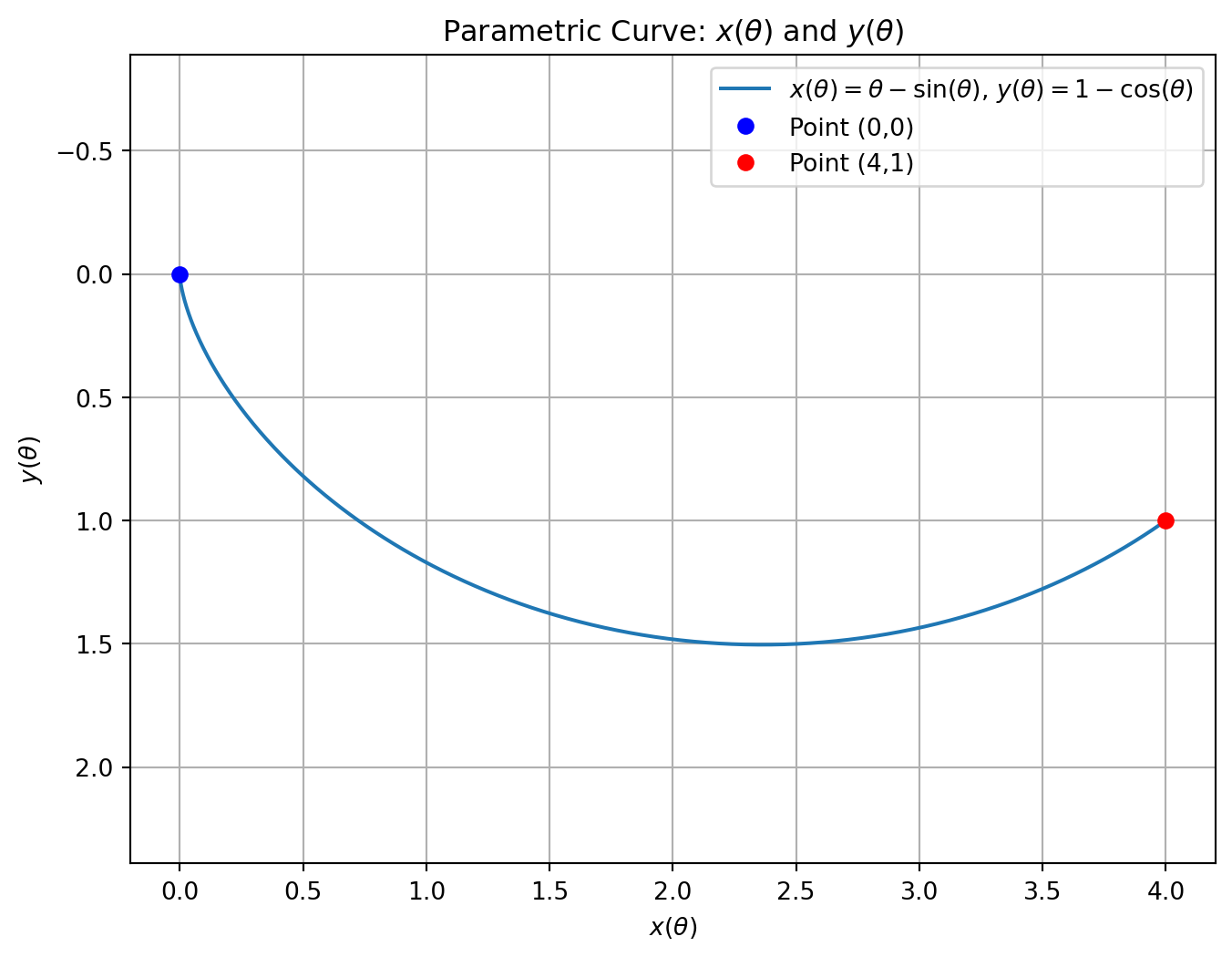
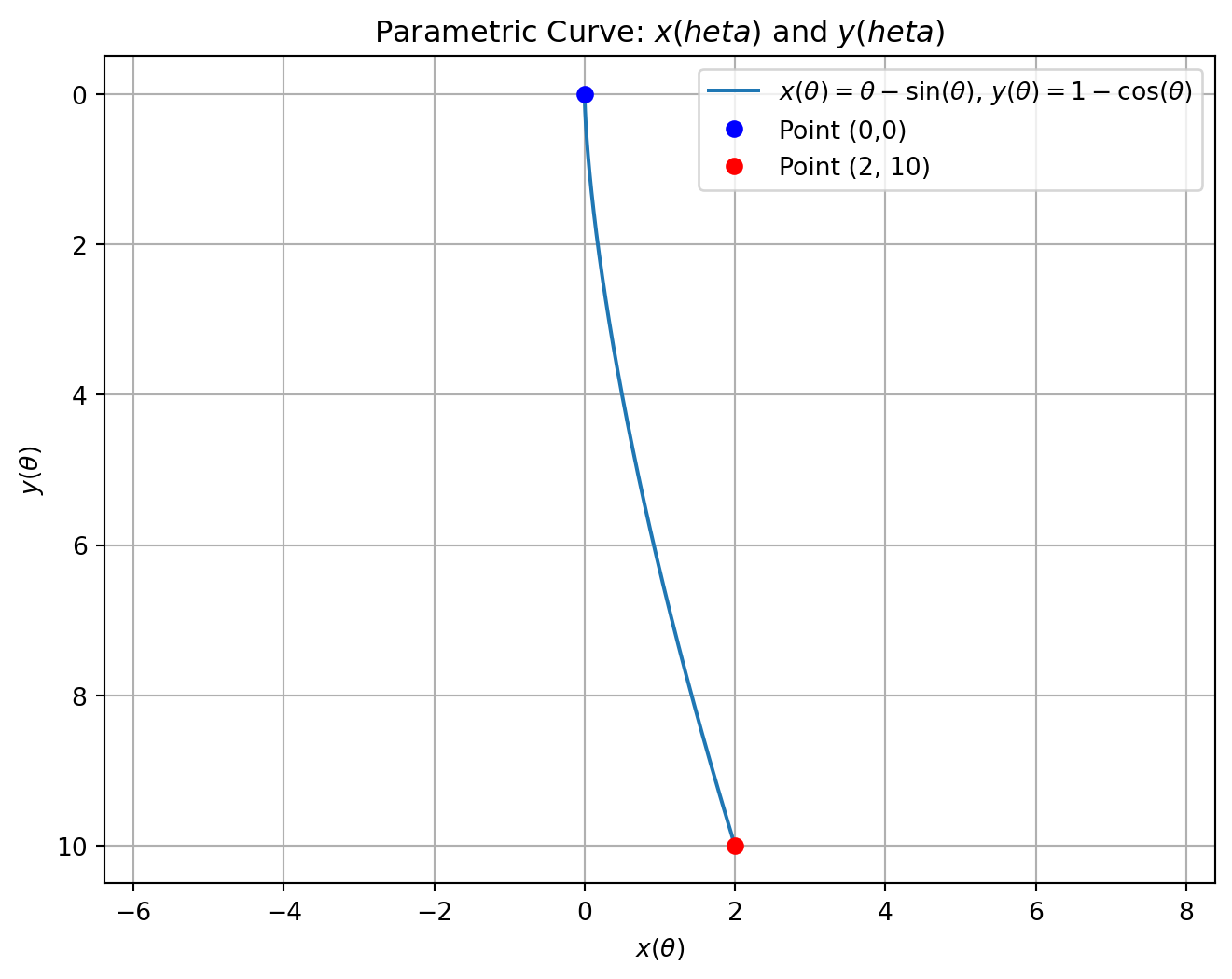
定数を変える
x_f, y_f = 2, 10left, right = initial_interval(x_f)
const = binary_search_param(left, right, eps)theta_1 = sol_to_xf(const)
theta = np.linspace(0, theta_1, 500)
# x(θ) と y(θ) の定義
x = const / 2 * (theta - np.sin(theta))
y = const / 2 * (1 - np.cos(theta))
# プロット
plt.figure(figsize=(8, 6))
plt.plot(x, y, label=r"$x(\theta) = \theta - \sin(\theta)$, $y(\theta) = 1 - \cos(\theta)$")
plt.plot(0, 0, "bo", label="Point (0,0)")
plt.plot(x_f, y_f, "ro", label=f"Point ({x_f}, {y_f})")
# 軸ラベル
plt.xlabel(r"$x(\theta)$")
plt.ylabel(r"$y(\theta)$")
# 軸のスケールを同じに設定
plt.axis("equal")
# y軸を逆転
plt.gca().invert_yaxis()
# グリッドを追加
plt.grid(True)
# グラフのタイトルと凡例を設定
plt.title("Parametric Curve: $x(\theta)$ and $y(\theta)$")
plt.legend()
# グラフを表示
plt.show()